Voitures autonomes : pour plus de sécurité, des recherches tous azimuts
Publié le - par le blob
C’est un signe des temps : la revue Science Robotics (groupe Science) consacre un numéro spécial aux voitures autonomes. Au menu, plusieurs articles consacrés au développement des « robots roulants », avec en toile de fond, le souci de la sécurité. En préambule, Neil Jacobstein, l’éditorialiste de la revue, note en effet que si les véhicules autonomes « sont imparfaits, ils sont susceptibles de devenir plus sûrs que ceux conduits par des humains ».
Scènes de rues pékinoises
Un système de simulation numérique de conduite a ainsi été mis au point par une équipe sino-américaine, baptisé AADS (pour Augmented Autonomous Driving Simulation). L’objectif est d’entraîner des logiciels d’intelligence artificielle à la conduite autonome dans des conditions proches de celles de la vie réelle, mais sans avoir besoin de faire parcourir des dizaines de milliers de kilomètres à de véritables véhicules.
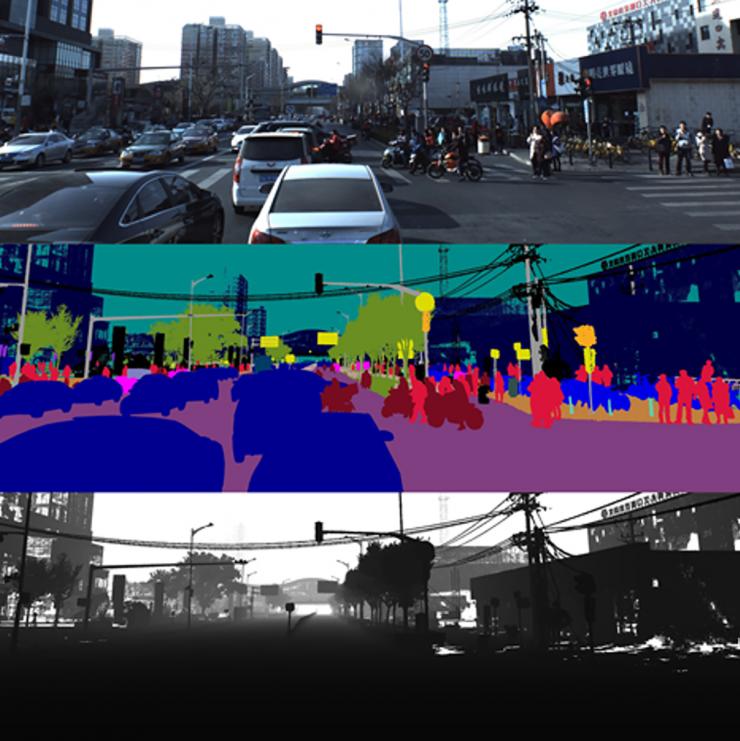
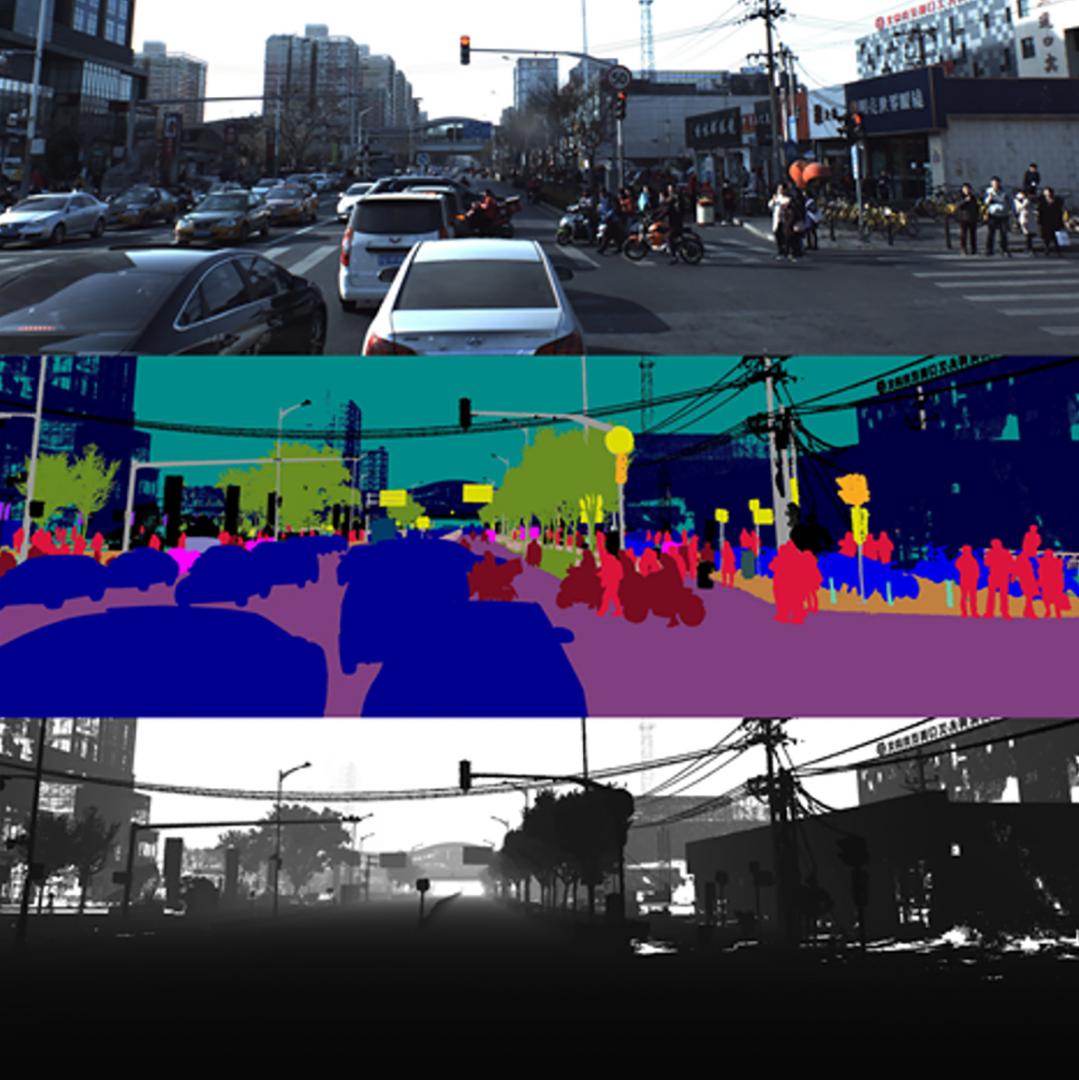
Pour cela, des scènes de rue ont été scannées à Pékin par des lidars (télédétection par laser) et des caméras. Les données ainsi récoltées ont permis de modéliser des mouvements de voitures réalistes, de déplacements de piétons et d’évolution du trafic. La détection des objets et les prédictions de trafic ainsi générées se sont révélées supérieures à celles issues des modèles actuels de simulation, souligne l’équipe. Prochaine étape : enrichir ces modèles d’éléments saisonniers, tels que la fréquence des pluies ou les épisodes neigeux.
Virage parfait


Dû à des chercheurs de l’université de Stanford, un autre article décrit un réseau de neurones, c’est-à-dire un type d’algorithme très employé en intelligence artificielle, capable de calculer la meilleure trajectoire d’une voiture dans une courbe : sans trop freiner mais sans déraper. Deux autres articles décrivent les adaptations urbaines nécessaires à l’accueil de véhicules autonomes et un système de test capable d’accroître à chaque étape les difficultés soumises aux logiciels de conduite.
